华为云AI开发平台ModelArts创建超参搜索作业_云淘科技
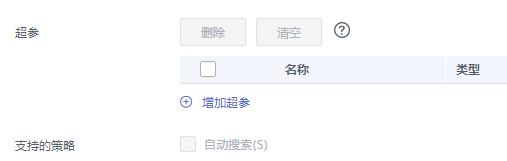
背景信息 对于用户希望优化的超参,需在“超参”设置中定义,可以给定名称、类型、默认值、约束等,具体设置方法可以参考定义超参。 如果用户使用的AI引擎为pytorch_1.8.0-cuda_10.2-py_3.7-ubuntu_18.04-x…
AI开发平台ModelArts
背景信息 对于用户希望优化的超参,需在“超参”设置中定义,可以给定名称、类型、默认值、约束等,具体设置方法可以参考定义超参。 如果用户使用的AI引擎为pytorch_1.8.0-cuda_10.2-py_3.7-ubuntu_18.04-x…

训练作业运行结束后,ModelArts可为您的模型进行评估,并且给出调优诊断和建议。 针对使用预置算法创建训练作业,无需任何配置,即可查看此评估结果(由于每个模型情况不同,系统将自动根据您的模型指标情况,给出一些调优建议,请仔细阅读界面中的…
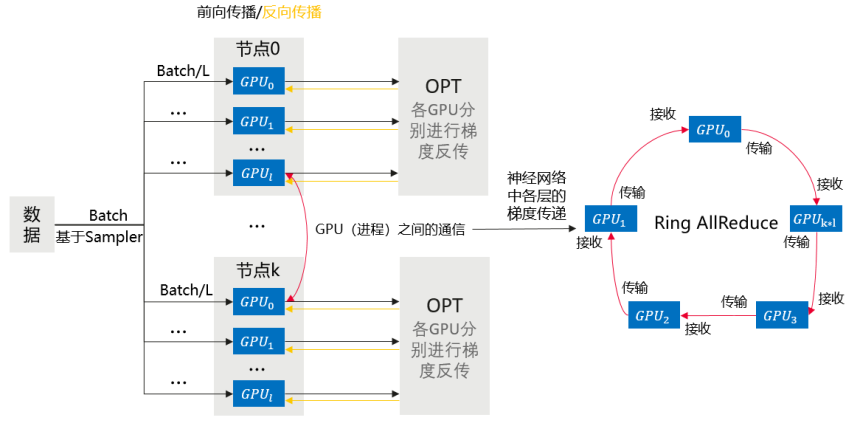
本章节介绍基于Pytorch引擎的多机多卡数据并行训练。 训练流程简述 相比于DP,DDP能够启动多进程进行运算,从而大幅度提升计算资源的利用率。可以基于torch.distributed实现真正的分布式计算,具体的原理此处不再赘述。大致的…
数据校验 数据清洗 数据选择 数据增强 同意关联代理商云淘科技,购买华为云产品更优惠(QQ 78315851) 内容没看懂? 不太想学习?想快速解决? 有偿解决: 联系专家

展示训练作业的标签。支持添加、修改、删除标签。标签详细用法请参见ModelArts如何通过标签实现资源分组管理。 图1 标签 父主题: 完成一次训练 同意关联代理商云淘科技,购买华为云产品更优惠(QQ 78315851) 内容没看懂? 不太…

删除数据处理任务 当已有的数据处理任务不再使用时,您可以删除数据处理任务。 处于“完成”、“失败”、“已停止”、“运行失败”、“部署中”状态的训练作业,您可以单击操作列的“删除”,删除对应的数据处理任务。 查看数据处理任务详情 登录Mode…
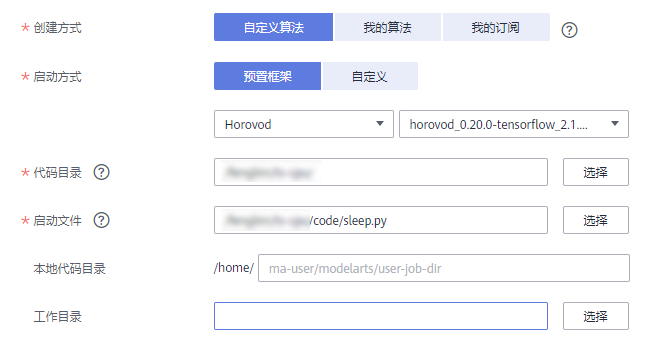
由于需要训练作业处于“运行中”状态才能登录CloudShell,因此本文介绍如何使训练作业保持运行中状态,方便您快速通过CloudShell登录运行中的训练容器。 通过Sleep命令使训练作业保持运行 如果你使用的是预置框架: 在Model…

以下对resnet18在cifar10数据集上的分类任务,给出了分布式训练改造(DDP)的完整代码示例。 训练启动文件main.py内容如下(若需要执行单机单卡训练任务,则将分布式改造的代码删除): import datetime impo…
您可以创建一个数据处理任务,对已有的数据进行数据校验、数据清洗、数据选择或者数据增强操作。 前提条件 数据已准备完成:已经创建数据集或者已经将数据上传至OBS。 确保您使用的OBS与ModelArts在同一区域。 创建数据处理任务 登录Mo…

针对MindSpore类引擎,ModelArts提供训练模式选择,支持用户根据实际场景获取不同的诊断信息。 在训练作业创建页面,支持普通模式、高性能模式和故障诊断模式,默认设置为普通模式。普通模式的调测信息可参考查看训练日志。 针对于新增的…
